Tuesday 08 April 2025
The pursuit of autonomous driving has long been a holy grail for tech enthusiasts and automakers alike. While significant progress has been made, the road to fully autonomous vehicles remains long and winding. One major hurdle is the ability to generate accurate and diverse multimodal trajectories, which are essential for safe and efficient navigation.
In recent years, researchers have explored various approaches to tackle this challenge. Some have focused on modeling multimodal trajectory distributions, while others have employed diffusion-based methods to predict future vehicle movements. However, these methods often suffer from high trajectory divergence and inconsistencies between guidance and scene information.
Enter GoalFlow, a novel approach that effectively constrains the generative process to produce high-quality, multimodal trajectories. By introducing a goal point and employing an efficient generative method called Flow Matching, GoalFlow addresses the issues plaguing previous methods.
The key innovation behind GoalFlow lies in its ability to establish a novel scoring mechanism for selecting the most appropriate goal point from candidate points based on scene information. This is achieved through a fusion of scores that reflect both the drivability of the point and its distance relationship with the goal.
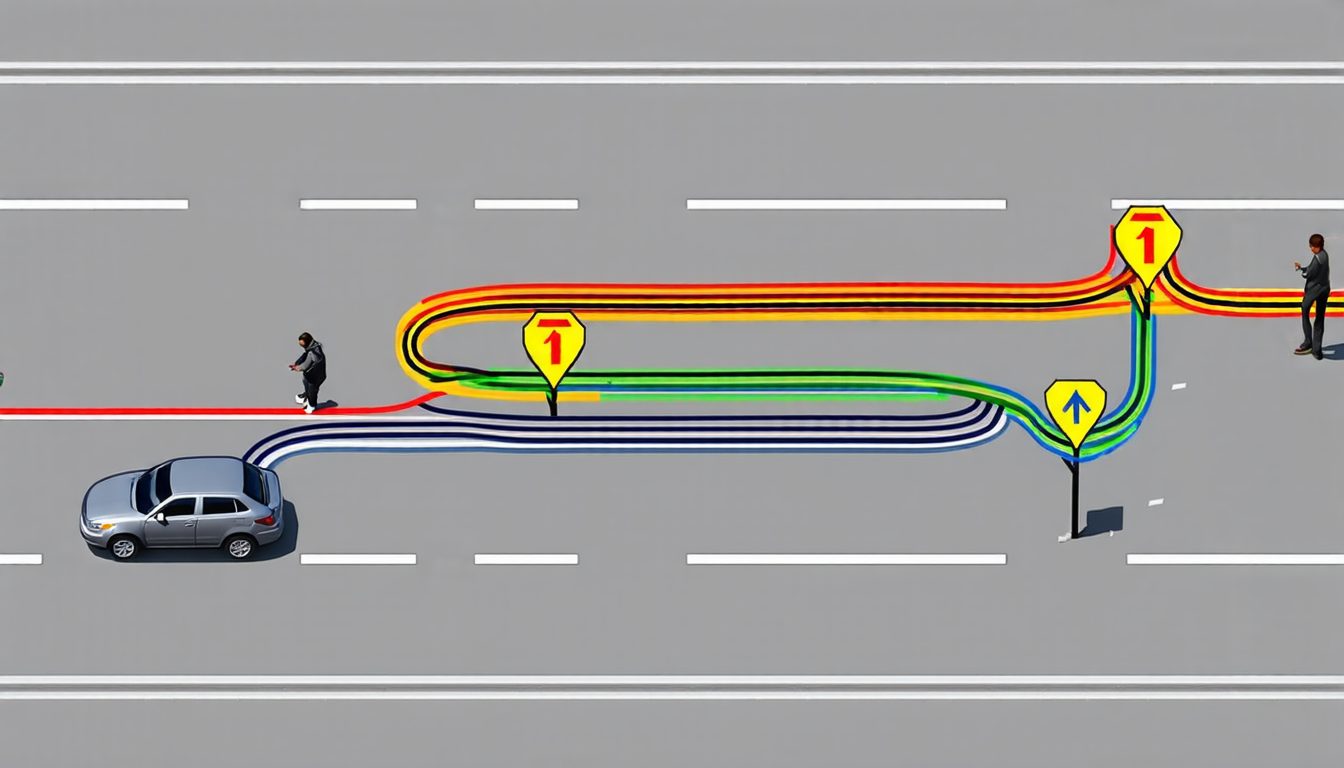
To test GoalFlow’s capabilities, researchers generated 128 trajectories for four different scenarios: going straight, turning left, turning right, and yielding. The results demonstrate that GoalFlow produces higher-quality trajectories compared to other methods, with a significant reduction in trajectory divergence and inconsistencies.
One of the most striking aspects of GoalFlow is its ability to effectively distinguish between different modalities by utilizing distinct goal points. This is evident in the visualizations provided, which show clear boundaries between different types of trajectories.
The implications of GoalFlow are far-reaching, as it has the potential to significantly improve the performance and reliability of autonomous vehicles. By generating accurate and diverse multimodal trajectories, GoalFlow can help ensure safe and efficient navigation, even in complex and dynamic environments.
While there is still much work to be done before fully autonomous vehicles become a reality, GoalFlow represents an important step forward in this journey. Its innovative approach and promising results make it an exciting development that warrants further exploration and refinement.
In the coming months and years, we can expect to see continued advancements in the field of autonomous driving. As researchers continue to push the boundaries of what is possible, we may yet uncover even more effective solutions to the challenges facing this technology. For now, however, GoalFlow stands as a shining example of the power of innovation and collaboration in shaping the future of transportation.
Cite this article: “Autonomous Driving Made Smarter: GoalFlows Breakthrough in Multimodal Trajectory Generation”, The Science Archive, 2025.
Autonomous Driving, Multimodal Trajectories, Goal Point, Flow Matching, Scene Information, Drivability, Distance Relationship, Trajectory Divergence, Consistency, Navigation





